Über miäch

Embedded Software Engineer
Lindenstrasse 4
8890 Flums (SG) Schwiiz
gebourä: 04.10.1993
email: patrick.good@goodware.ch
Abschluss: BSc Systemtechnik (Ingenieurs Informatik)
Aktuels Studium: MSE Computer Science Abschluss (Feb 2025)
Masterarbet: Agiler und flexibler Transportroboter
Transportierä imenä Spitoul würd vo schu überforderdä Mitstritter gmacht. Mir win söttigi Ufgabä vu ämänä eifachä und flexiblä Transportroboter machä lu. Dr Roboter muäs sich an bestehendi Transportwäge andocke chünne, und die zühä chünne. Er muäs komplexi rüümlichi Situationä meisterä (Lüt oder Gegenstind uf dr Fahrbaa). Dr Roboter muäs stürbari Schwinkräder ha, Türe öffnä chünnä und sich au uf z'Sitä schiebä lu.
Fertig im September 24
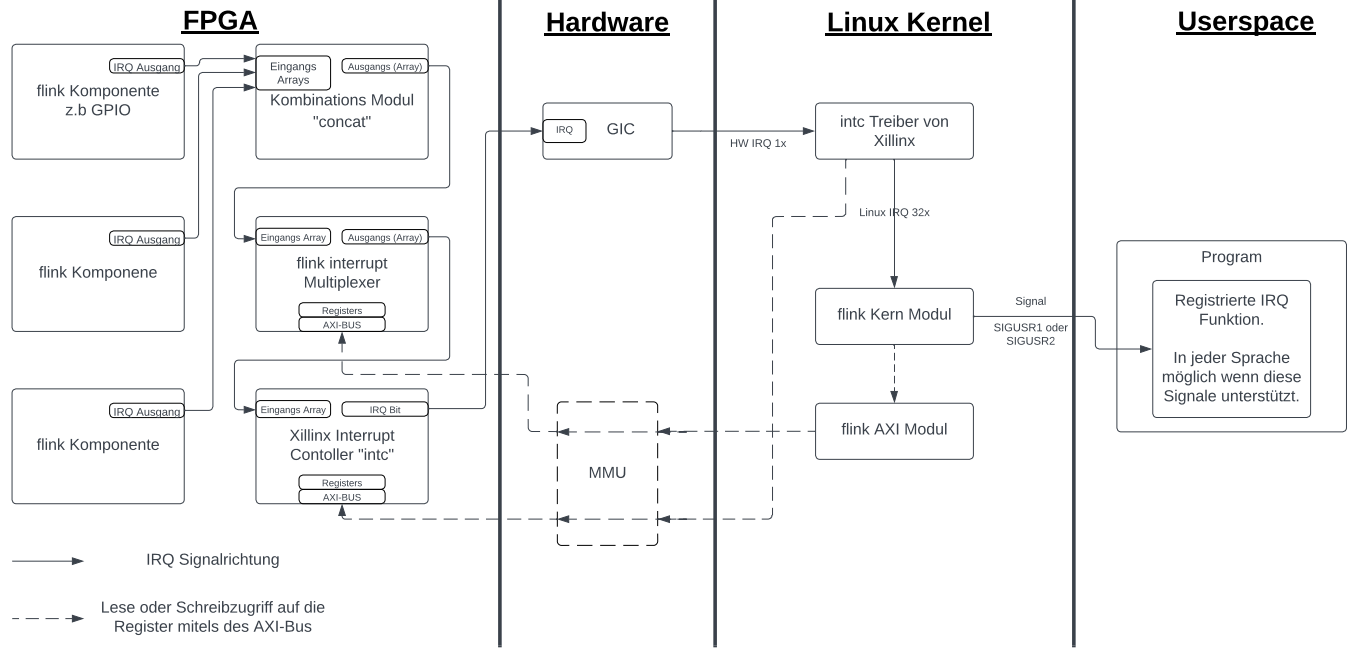
VT2: Interruptfähige Erwiterig für Flink
Ds Flink-Framework vu dr OST würd um Reflexlichtsensorä, Schrittmotourä und a Interruptfähigkeit erwiteret. Triiber für all diä Komponentä sind im VHDL implementiert, wi au Konfigurationseliment für d'Interruptfähigkeit. Usserdem isch s'Kernelmodul vo Flink erweiteret wordä, um d'FPGA-Interrupts z'empfangä und di an ä entsprechendä Prozäss wiiterzleitä. Zudem isch ä C-Bibliothek für dr Userspäce und Python-Wrapper-Klass gschribe wordä.
S'öffentlich Git Repo isch dou z'findä.
VT1: Python uf emämä Microzed-Board
Diä Aarbet befasst sich mit d'em Betrieb vo Linux uf emänä Zynq7000 SoC, där hät zwei ARM Cortex A9 Cores und ä FPGA, diä sind über dä interni AXI-Bus verbundä. D'Konfiguraziu vo Linux für das Syschtäm isch mit Petalinux gmacht wordä, wo uf Yocto basiert. Därzue isch Flink uf em FPGA installiert wordä, um d'GPIOs spezielli Funktionalitetä wie UART, SPI, Watchdog, Schrittmotor und so wiiter zue zuwiisä.
Dokumentation abeladä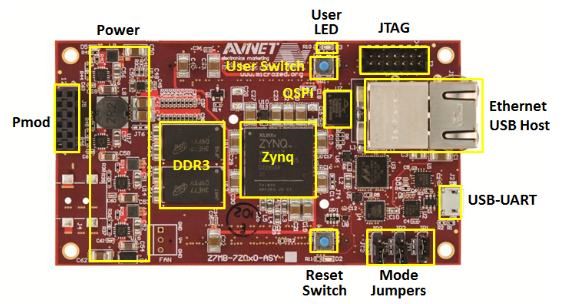
Bachelorarbet: Vernetzig vo Beobachtigsstatiunä
Um dr Datenustusch vo Bildli, GPS-Daten und andere Sensordatä zwüsched de Mosito TI Gerät vo der Firma Safran Vectronix AG z'ermöglichä, isch ä Overlay-Netzwärch erstellt worde. Das Overlay-Netzwärch kint jedes Moskito TI Grät wo im Netzwärch isch. S'Overlay-Netzwärch vo de Gerät isch selbstverwaltend, so dass jedes neui Moskito TI automatisch bi de andere Moskito TI, ohni d'verwendig vumänä Server, registrierä cha.
Dokumentation abeladä