Über mich

Embedded Software Engineer
Lindenstrasse 4
8890 Flums (SG) Schweiz
Geburtsdatum: 04.10.1993
E-Mail: patrick.good@goodware.ch
Abschluss: BSc Systemtechnik (Ingenieurs Informatik)
Aktuelles Studium: MSE Computer Science Abschluss (Feb 2025)
Master Thesis: Agiler und flexibler Transportroboter
Transportaufgaben in einem Spital werden häufig von ausgelastetem Personal durchgeführt. Wir möchten solche Aufgaben von einem einfachen und flexiblen Transportroboter durchführen lassen. Der geplante Roboter muss an bestehende Transportwagen andocken und diese transportieren können. Dabei müssen komplexe räumliche Situationen gemeistert werden (Personen oder Gegenstand in der Fahrbahn). Der Roboter soll über lenkbare Schwenkräder verfügen, soll Türen öffnen können und soll sich zur Seite schieben lassen.
Abschluss September 24
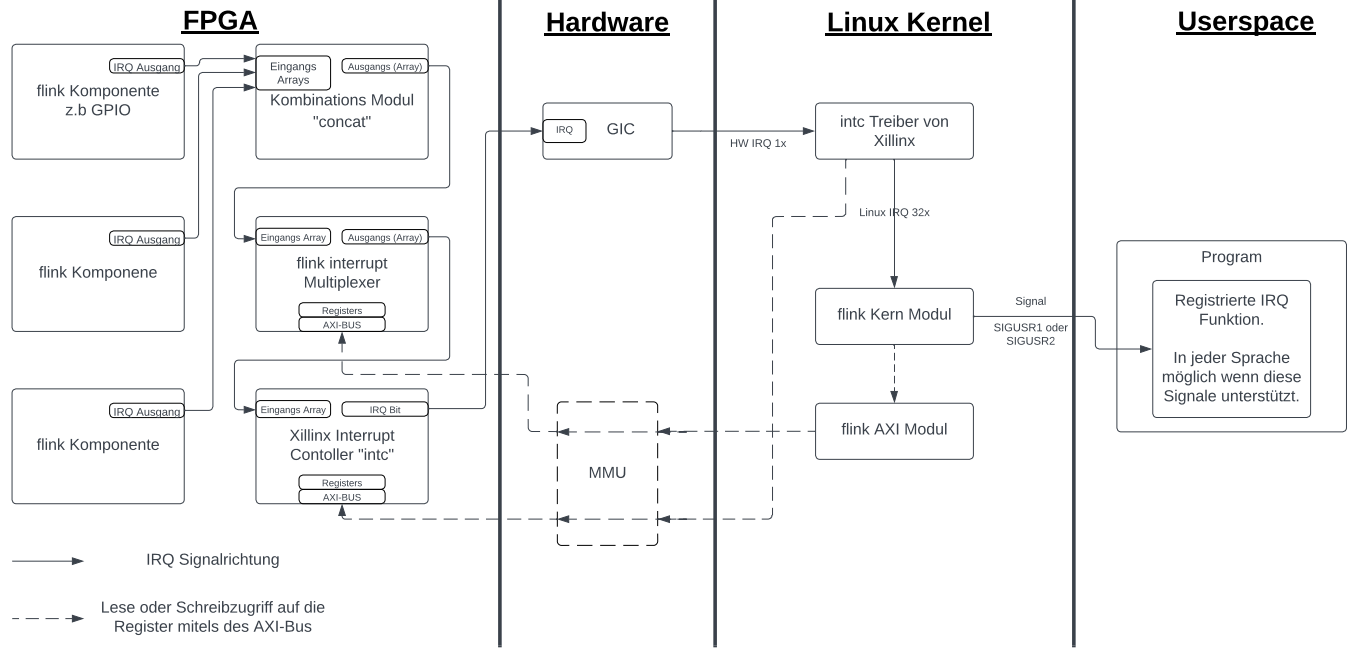
VT2: Interruptfähige Erweiterung für flink
Das Flink-Framework der OST wird um Reflexlichtsensoren, Schrittmotor und Interruptfähigkeit erweitert. Treiber für diese Komponenten sind in VHDL implementiert. Ebenso sind die Konfigurationselemente für die Interruptfähigkeit in VHDL realisiert. Darüber hinaus wurde das Kernelmodul von Flink erweitert, um die FPGA-Interrupts zu empfangen und diese an den entsprechenden Prozess weiterzuleiten. Zudem wurden C-Bibliotheken für den Userspace und Python-Wrapper-Klassen entwickelt.
Das Öffentliche Git repo ist hier zu finden
VT1: Python auf dem Microzed-Board
Diese Arbeit befasst sich mit dem Betrieb von Linux auf dem Zync7000 SoC. Diese Hardware enthält zwei ARM Cortex A9 Cores und ein FPGA. Die Konfiguration von Linux für dieses System wurde mit Petalinux, welches auf Yocto aufbaut, durchgeführt. Zusätzlich wurde Flink auf dem FPGA installiert, um den GPIOs spezielle Funktionalitäten wie UART, SPI, Watchdog, Schrittmotor usw. zuzuweisen.
Dokumentation herunterladen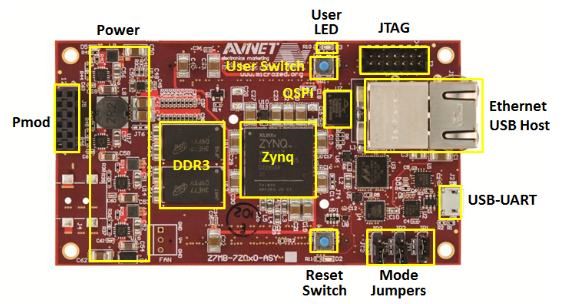
Bachelor Thesis: Vernetzung von Beobachtungsstationen
Um den Datenaustausch von Bildern, GPS-Daten und anderen Sensordaten zwischen den Mosito TI Geräten der Firma Safran Vectronix AG zu ermöglichen, wurde ein Overlay-Netzwerk erstellt. Dieses Netzwerk umfasst jedes Moskito TI Gerät, das sich im Netzwerk befindet. Das Overlay-Netzwerk der Geräte ist selbstverwaltend. Jedes neue Moskito TI wird automatisch bei den anderen Moskito TI, ohne die Verwendung eines Servers, registriert.
Dokumentation herunterladen