About me

Embedded Software Engineer
Lindenstrasse 4
8890 Flums (SG) Switzerland
Date of Birth: October 4, 1993
Email: patrick.good@goodware.ch
Degree: BSc Systems Engineering (Engineering Informatics)
Current Studies: MSE Computer Science Degree (Feb 2025)
Master Thesis: Agile and Flexible Transport Robot
Transport tasks in a hospital are often carried out by already overburdened staff. We want such tasks to be performed by a simple and flexible transport robot. The planned robot must be able to dock to existing transport carts and transport them. It must master complex spatial situations (people or objects in the pathway). The robot should have steerable castor wheels, be able to open doors, and be shiftable to the side.
Completion September '24
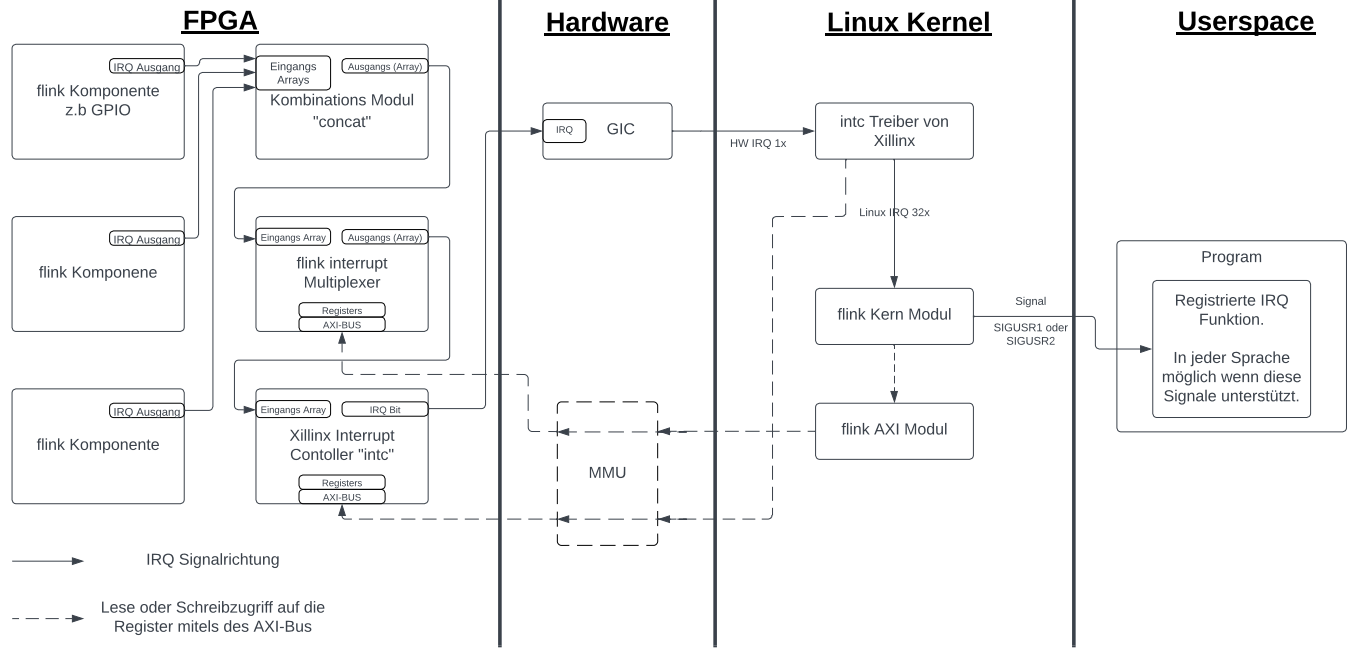
VT2: Interrupt-capable Extension for Flink
The Flink Framework from OST is extended by reflective light sensors, stepper motor, and interrupt capability. Drivers for these components are implemented in VHDL, as well as configuration elements for interrupt capability. Furthermore, Flink's kernel module has been extended to receive FPGA interrupts and forward them to the corresponding process. Additionally, C libraries for the user space and Python wrapper classes were developed.
The public Git repo can be found here.
VT1: Python on the Microzed Board
This work deals with operating Linux on the Zynq7000 SoC, which contains two ARM Cortex A9 cores and an FPGA, connected via the internal AXI bus. Linux configuration for this system was performed with Petalinux, based on Yocto. Additionally, Flink was installed on the FPGA to assign special functionalities like UART, SPI, Watchdog, stepper motor, etc., to the GPIOs.
Download Documentation (German)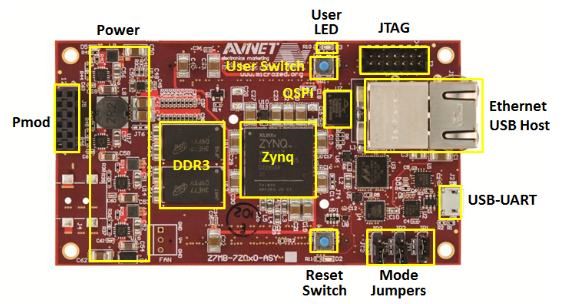
Bachelor Thesis: Networking of Observation Stations
To enable the exchange of images, GPS data, and other sensor data between the Mosito TI devices of Safran Vectronix AG, an overlay network was created. This network encompasses every Moskito TI device within the network. The device's overlay network is self-managing, so each new Moskito TI automatically registers with the other Moskito TIs without the use of a server.
Download Documentation (German)